我的项目
展示我的技术实践和项目经验


工程项目
2024.12 - 2025.07
基于YOLOv11的全自动水下垃圾回收机器人
项目负责人
为了解决复杂水下环境中垃圾清理效率低下的问题,本项目在白洋淀水下垃圾清理场景中,机器人首次在水下应用变分图像分解技术对图像预处理,再将图像交给YOLO V11神经网络进行识别。通过深度学习进行算法优化,实现对垃圾的精准识别,同时强化学习使其能够根据实际作业环境自主决策,优化作业路径和回收策略,实现水下垃圾的精准识别与回收。
主要承担基于变分图像分解技术优化水下图像预处理,提升复杂水域垃圾检测精度,带领团队在白洋淀水域进行机器人捕捉水下垃圾测试,目前已实现机器人下水、垃圾图像识别以及垃圾捕捞。
成果:产品在研 发明专利1项 实用新型专利1项 软著1项 省级大学生创新项目
YOLOv11
ROS
OpenCV
变分图像分解
强化学习
深度学习
学术科研
2025.06 - 2026.03
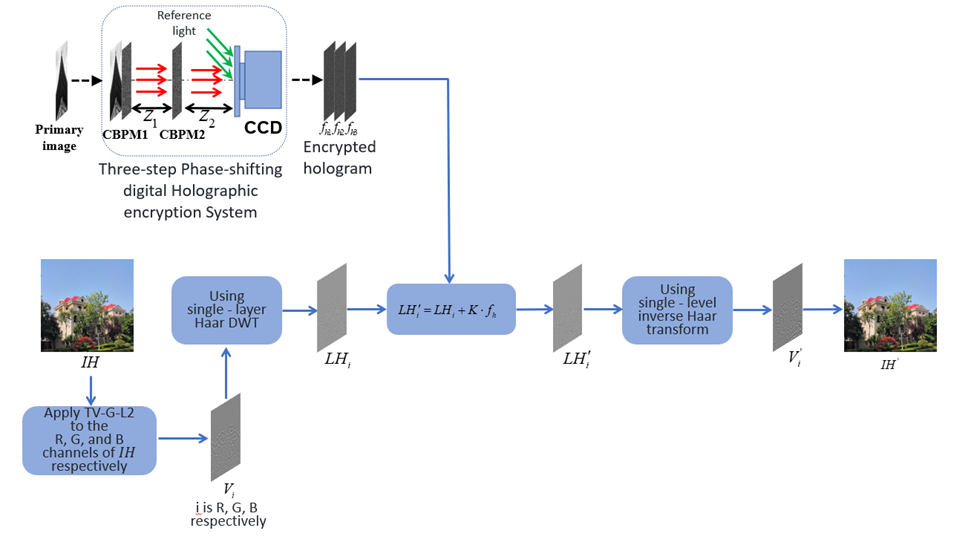
基于数字全息和人体耳廓特征密钥的光学图像隐藏
项目负责人
- 项目背景 针对传统光学图像隐藏技术中密钥与用户身份脱节的安全隐患,提出一种基于人体耳廓生物特征的图像隐藏方案。将高稳定的耳廓微纹理直接作为加密密钥,消除网络传输风险,实现'一人一钥'的高安全防护。
- 实验方法 利用 SHA-256 和混沌 Lozi 映射将耳廓特征转化为随机相位掩膜,结合三步相移数字全息技术将明文图像加密为三幅类噪声全息图。创新性引入变分图像分解与离散小波变换,将全息图精准嵌入载体图像纹理层的中频子带,实现高隐蔽性隐藏。
- 结果分析 仿真表明系统性能卓越:1)隐蔽性:载体隐藏前后相关系数(CC)达 0.9918,解密图像 CC 值为 1,实现无损还原;2)安全性:密钥空间突破 2^389,密文相邻像素相关性极低(小于 0.01),具备极强密钥敏感性,特征旋转超 0.5 度或遮挡 1% 即解密失败;3)鲁棒性:在面临 25% 数据裁剪或方差为 0.3 的强高斯噪声(SSIM>0.5)等极端攻击时,仍能恢复高识别度图像。
成果:Shuangzhao, WeiliangLi. Optical image hiding based on digital holography and human auricle feature key [J]. Optik, 2025(已返修,under review)
MATLAB
数字全息
图像加密
变分图像分解
小波变换
生物特征识别